蛇型機器人COBRA移動新方法 有望實現大規模應用

美國東北大學研究室開發出新方法,讓蛇型機器人COBRA更準確地調節接觸力,在移動時能同步搬運物體,有望實現蛇型機器人大規模應用。
編譯/曲姵蓉
相比傳統機器人,蛇型機器人的優劣勢更明顯,雖然可以在狹小環境中穿梭自如,但是無法撿取和控制物體是蛇型機器人最大缺點。美國東北大學研究室開發出新方法,讓蛇型機器人COBRA更準確地調節接觸力,在移動時能同步搬運物體,有望實現蛇型機器人大規模應用。
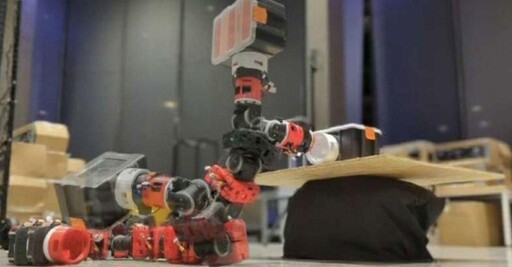
蛇形機器人COBRA
根據報導,美國東北大學矽突觸實驗室研究小組近日發表新論文,引進物體定位與操作概念,拓展COBRA運動能力,最終它能夠變成不同形狀,擁有五種不同類型的運動方式,能夠同時移動和操控物體。對比傳統機器人,只有蛇型機器人是利用變形能力改變慣性與翻滾方向。
更多新聞:機器人集成控制需求激增 西門子領軍推動
反作用力對蛇型機器人影響
影片中顯示COBRA機器人頭部可以夾取物體,當機器人翻滾時,它的頭部和尾部會鎖在一起,形成一個輪狀結構,才能安全又快速地滾下斜坡。研究團隊甚至開發出一種強化規畫器,探討地面反作用力對機器人運動和控制物體的影響與策略,強化COBRA能力。
更準確調節接觸力
研究成員Adarsh Salagame表示,蛇型機器人與標準的人形機器人不一樣,擁有更多變且多元運動能力,需要更準確地調節身體接觸力,才能在短時間內變化成不同形狀,自主控制身體與地面接觸的部位。
目前,研究團隊正試圖為COBRA安裝鏡頭和IMU感測器零件,有效辨識不同盒子,並移動到指定位置,同時利用機器人響尾蛇式運動來執行更多不同自主運動任務,目標實現蛇型機器人大規模應用。
資料來源:Tech X Plore
這篇文章 蛇型機器人COBRA移動新方法 有望實現大規模應用 最早出現於 TechNice科技島-掌握科技與行銷最新動態。
- 記者:李佩璇
- 更多科技新聞 »
